Research
1. Fast and High-Precision Motion Control
High-precision mechanical systems, including machine tools and semiconductor manufacturing equipment, must achieve higher speeds and greater accuracy. However, increased operating speeds and reduced structural rigidity intensify mechanical vibrations and nonlinear effects such as friction and variable stiffness. These challenges limit improvements in positioning accuracy and machining or transfer performance.
Our research group develops vibration-suppression control technologies that address these mechanical characteristics. We also model nonlinear behaviors, analyze mechanical vibrations using CAE, and pursue integrated designs that combine mechanical and control system engineering.
2. Precision Actuation and Measurement Systems Using Functional Materials
Functional materials, such as piezoelectric elements, enable highly responsive actuation and sensing, making them suitable for precision positioning devices, micromanipulators, and micro-force measurement systems. However, their nonlinear characteristics, including hysteresis and creep, require advanced modeling and control technologies to achieve high-precision control and measurement.
Our research group focuses on analyzing and controlling the nonlinear characteristics of piezoelectric elements, developing sensorless and self-sensing control methods, and designing micromanipulators integrated with mechanical systems.


Joint Degree Doctoral Program in Energy Conversion Systems
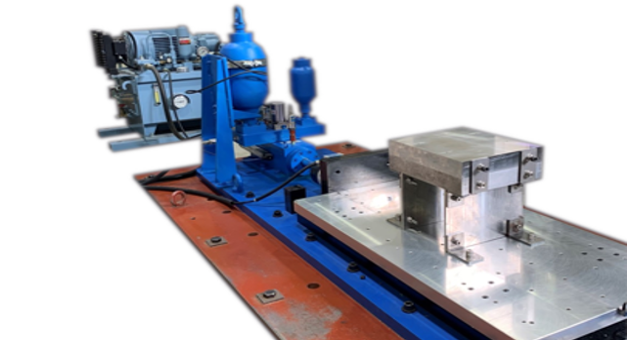
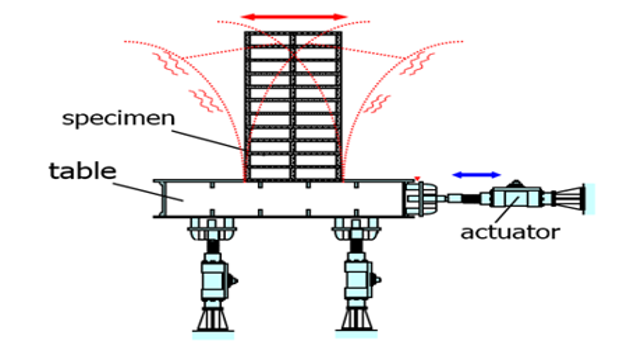
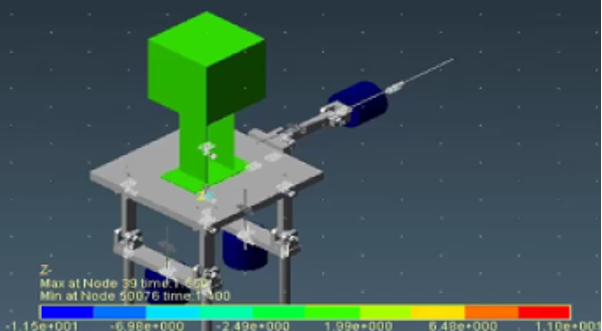
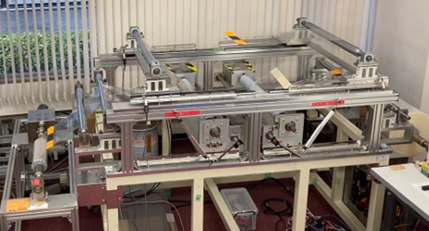
3. Control of Fluid Power Systems
Fluid power systems using hydraulics and pneumatics generate large forces more efficiently than electric systems. They are widely applied in industrial machinery and vehicles due to their direct handling of force and pressure. However, factors such as fluid compressibility, friction, leakage, and nonlinearities require advanced control technologies for precise operation.
Our research group develops force and position control technologies that address these system characteristics. We are also enhancing the performance of control devices for pressing operations, earthquake simulators, vibration testing machines, and vehicle actuators.
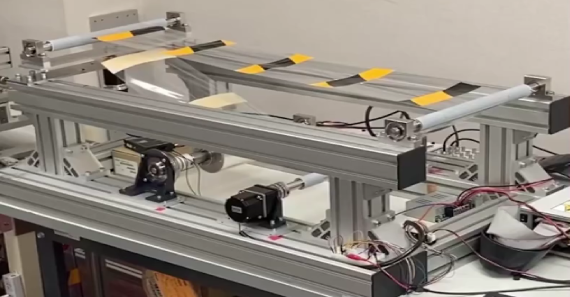
3. High-Precision Tension Control of Web Handling Systems
Roll-to-roll web handling systems continuously transport flexible media, such as films and sheets, and are widely used in printing, electronics, batteries, and film manufacturing. However, these materials are prone to deformation, and issues such as speed and tension fluctuations, lateral deviation, and wrinkles can compromise quality. High-precision transport control and state detection technologies are therefore essential.
Our research group is developing a control system accounting for the dynamic properties of flexible media to improve accuracy in roll-to-roll web handling. We are also advancing state monitoring and control technologies to prevent defects, such as creases, by detecting film troughs and lateral deviation through image analysis.
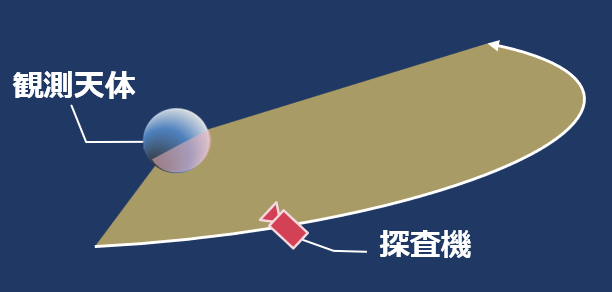
5. Image Tracking and Actuator Control for Asteroid Exploration Missions
In asteroid flyby observations, a spacecraft is required to achieve an appropriate observation geometry and keep the target body within the cameraБfs field of view with high accuracy during the short period in which it passes near the target. To accomplish this, in addition to trajectory design that satisfies mission requirements, tracking control using image information and precision actuator control in space are essential.
Our research group focuses on flyby trajectory design, image-based tracking control of target bodies, and actuator control adapted to the space environment for asteroid exploration missions. By integrating these technologies, we aim to achieve high-precision flyby observations with small spacecraft.