研究内容
1. 高速高精度機械システムの振動制御
工作機械や半導体製造装置などの高速高精度機械システムでは,より速く,より正確な動作が求められます。一方で,高速化・装置の低剛性化に伴う機構振動や,摩擦・剛性変化などの非線形特性の影響が顕在化し,位置決め精度や加工・搬送性能の向上を妨げる要因となります。
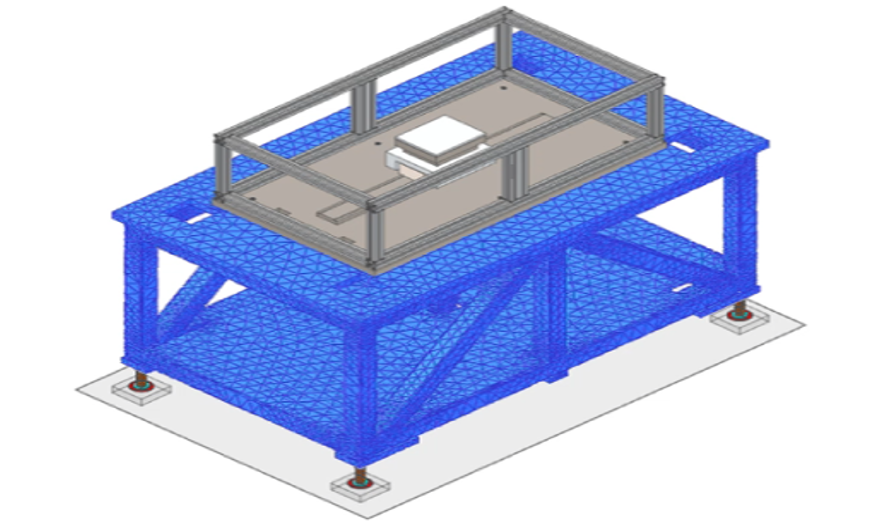
本研究では,これらの機械特性を考慮した振動抑制制御技術を開発するとともに,非線形特性のモデル化,CAEを援用した機構振動解析,機構設計と制御系設計を組み合わせた連成設計に取り組んでいます。
2. 機能性材料を用いた精密アクチュエータ・計測システム
圧電素子などの機能性材料は,小型で高応答な駆動・計測機能を実現できることから,精密位置決め装置,マイクロマニピュレータ,微小力計測システムなどへの応用が期待されています。一方で,ヒステリシスやクリープなどの非線形特性を有するため,高精度な制御や計測を実現するには,これらの特性を考慮したモデル化と制御技術が重要となります。
本研究では,圧電素子の非線形特性の解析と制御,センサ・アクチュエータ機能を利用したセンサレス制御・セルフセンシング制御,さらに機構設計と組み合わせたマイクロマニピュレータの設計に取り組んでいます。


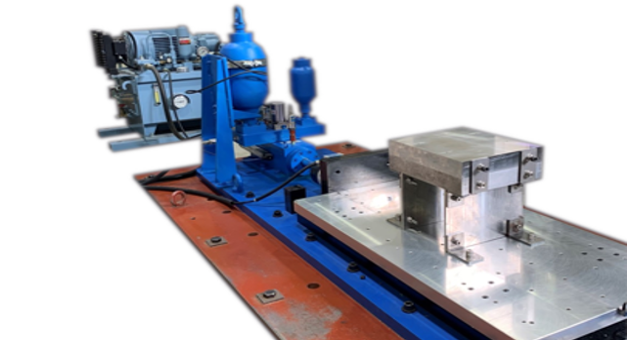
3. フルードパワーシステムの制御
油圧・空気圧を利用したフルードパワーシステムは,電動システムに比べて大きな力を発生しやすく,力や圧力を直接扱う駆動システムとして,産業機械や車両など幅広い分野で利用されています。一方で,流体の圧縮性,摩擦,漏れ,非線形性などの影響により,高精度な制御には高度な制御技術が求められます。
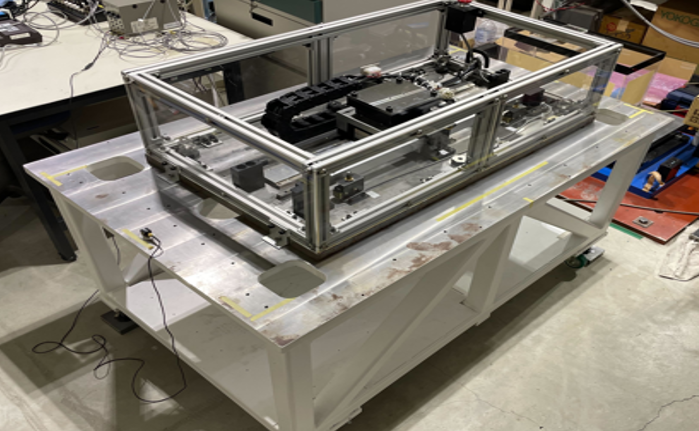
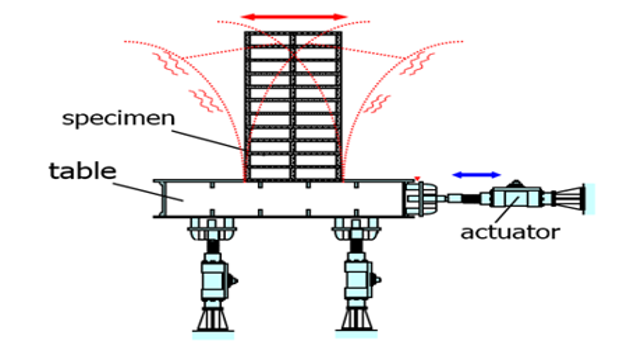
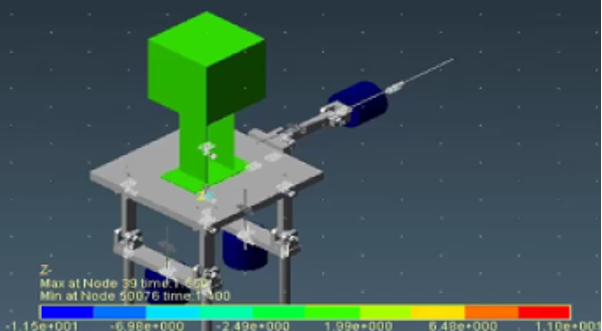
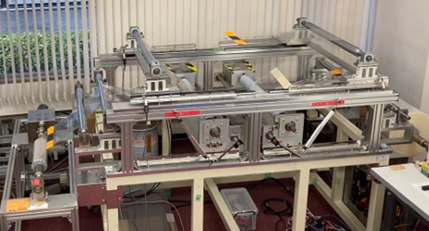
本研究では,これらの特性を考慮した力・位置制御技術を開発し,押し付け動作を行う制御装置や,地震シミュレータ・振動試験機,車両用アクチュエータの高性能化に取り組んでいます。
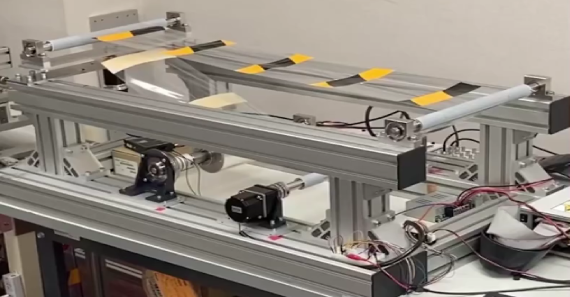
4. 柔軟媒体の高精度搬送制御
フィルムやシートなどの柔軟媒体を連続的に搬送するRoll-to-Rollウェブハンドリングシステムは,印刷,電子デバイス,電池,フィルム製造など幅広い分野で利用されています。一方で,柔軟媒体は変形しやすく,搬送速度や張力の変動,蛇行,しわなどが品質低下の要因となるため,高精度な搬送制御と状態検知技術が重要となります。 本研究では,Roll-to-Rollウェブハンドリングにおける搬送速度と張力精度の高度化を目的として,柔軟媒体の動特性を考慮した制御系設計に取り組んでいます。また,画像情報を用いたフィルムのトラフや蛇行の検知により,折れしわなどの不良発生を未然に防ぐための状態監視・制御技術についても検討しています。
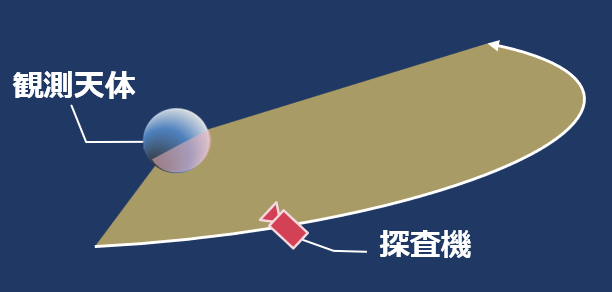
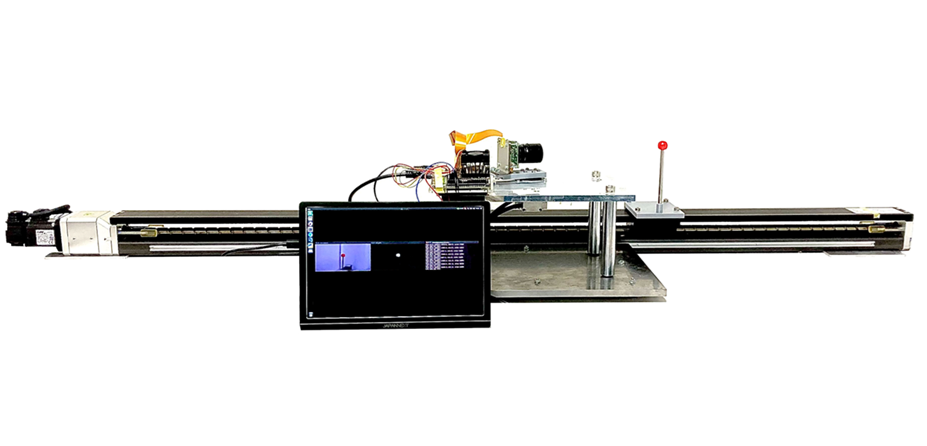
5. 小惑星探査ミッションの画像追尾・アクチュエータ制御
小惑星フライバイ観測では,探査機が対象天体の近傍を通過する短い時間の中で,適切な観測ジオメトリを実現し,対象をカメラ視野内に高精度に保持することが求められます。そのためには,ミッション要求を満たす軌道設計に加えて,画像情報を利用した追尾制御,さらに宇宙環境下でのアクチュエータの精密制御が重要となります。
本研究では,小惑星探査ミッションを対象に,フライバイ軌道の設計,画像フィードバックに基づく対象天体の追尾制御,および宇宙環境を考慮したアクチュエータ制御に取り組んでいます。これらを統合することで,小型探査機による高精度なフライバイ観測の実現を目指しています。